2024澳门原材料1688茄孑-资料免费精选
中
英
日
走进瑞松
关于瑞松
荣誉资质
合作伙伴
新闻中心
招贤纳士
联系我们
系统方案
汽车工业
两轮车行业
机械重工
3C电子
电梯行业
其它行业
智能装备
机器人
智能焊接
机器视觉
3C自动化
工业软件
EAXY Design
EAXY Chain
EAXY Part
RobDTS
工业互联
EAXY IIP
EAXY 3D Portal
AR智能巡检系统
在线计测物联网系统
设备生产监控系统
智能技术
数字孪生技术
白车身总拼技术
智能焊接技术
智能装配技术
机器视觉技术
高速滚边技术
自动化控制技术
投资者关系
首页
走进瑞松
关于瑞松
荣誉资质
合作伙伴
新闻中心
招贤纳士
联系我们
系统方案
汽车工业
两轮车行业
机械重工
3C电子
电梯行业
其它行业
智能装备
机器人
智能焊接
机器视觉
3C自动化
工业软件
工业互联
智能技术
数字孪生技术
白车身总拼技术
智能焊接技术
智能装配技术
机器视觉技术
高速滚边技术
自动化控制技术
投资者关系
AI+3D智能分拣系统
机器人
智能焊接
机器视觉
3C自动化
3D视觉检测系统
2D涂胶检测系统
3D涂胶检测系统
双目视觉引导系统
3D激光视觉寻位系统
AI+3D智能分拣系统
在线测量视觉系统
3D激光器
产品介绍
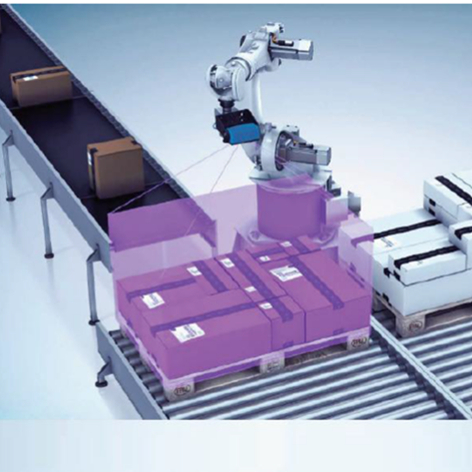
AI+3D智能分拣系统
系统基于双目结构光相机,搭载基于深度学习技术研发的目标识别定位3D视觉软件,组成完整的分拣拆垛系统解决方案。
双目结构光相机获取RGB图像和3D点云数据后,应用三维视觉软件进行数据处理,给出识别目标的分割结果和姿态定位及抓取点坐标信息,最后转换为机器人的抓取坐标,引导机器人移动到目标物体实现自动抓取。
结构光三维成像原理:
指利用结构(条纹或散点)光对空间进行编码,相机取像后进行解码,从而生成深度图像。该方式
无需物体或者相机移动
,短时间内可迅速获取三维轮廓信息。
系统方案
智能装备
工业软件
智能技术